新着情報 測量機器の盛替え不要の自動連続測量システムを開発 中小断面シールドにも適用が可能
2023/05/16
戸田建設(株)(本社:東京都中央区、社長:大谷 清介)は、(株)きんそく(本社:京都府京都市、社長:奥野 勝司)とともに、シールドトンネル工事における測量管理の効率化や施工精度の向上を目的に、ステレオカメラ※1を用いた新たな自動測量技術「MWMS(Measuring Worm Method system)」を開発しました。
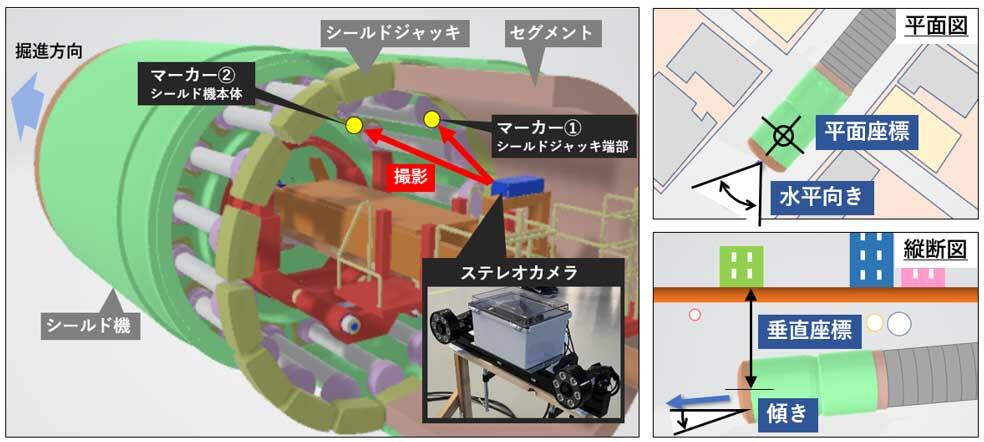
本システムは、固定したステレオカメラを用いて撮影したシールド機内の画像を解析することで、掘進中も連続してシールド機の位置(平面・垂直座標)と姿勢(水平向き、傾き)を把握できる測量技術です(図-1)。測量作業の省力化と、既往の自動測量技術では適用が難しかった比較的小さいシールドトンネルへの適用を可能としました。
- ※12つのカメラを用いて対象物を同時に撮影することにより、奥行き方向(距離)の情報も記録できるカメラのこと。
開発の背景
従来、シールド工事で自動測量を行う場合には、坑内に自動追尾型の測量機器(トータルステーション)を設置し、後方の基準点とシールド機内の少なくとも2点のターゲットを見て測量します。しかし、掘進が進んで距離が離れ過ぎた場合や曲線部を施工した場合に測量機器でターゲットを視準できなくなると、その度に測量機器を盛り替える手間が生じることが課題でした。また比較的トンネル断面が小さい場合では、走行台車との接触や視準時の障害等が生じるため測量機器の配置自体が難しく、自動測量技術の適用が困難でした。
本システムの概要
本システムではステレオカメラを用いて、シールドジャッキの端部とシールド機本体に設置された複数個のマーカーを自動で撮影し、画像解析によりシールド機の位置座標と姿勢を測量します。ステレオカメラをシールド機後方の追随する設備に固定することで、前述した既往の自動測量技術の課題を解決しました。 計測手順を図-2に示します。掘進およびセグメント組立の作業中に、尺取り虫のように伸縮を繰返すシールドジャッキの動きに合わせて基準点を入れ替え、前後のマーカーを捉え続けます。
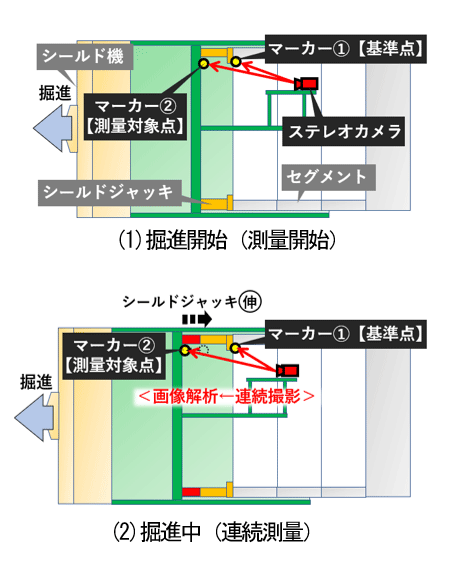
- (1) 掘進開始(測量開始)
マーカー①を掘進中の仮の不動点とみなして測量の基準点とし、掘進とともに測量を開始する。
- (2) 掘進中(連続測量)
カメラ撮影と画像処理により移動するマーカー②の位置を捉え続ける。
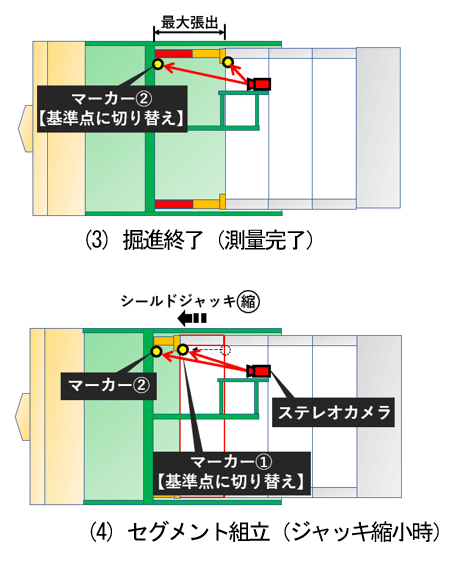
- (3) 掘進終了(測量完了)
マーカー②をセグメント組立中の不動点とみなしシールドジャッキを縮める前に基準点を②に切り替える。
- (4) セグメント組立
ジャッキ縮小とセグメント組立後、シールドジャッキをセグメントに密着させる。掘進準備が整ったら、測量してマーカー①の位置を確認し、基準点を再び①に切り替える。➡(1)
図-2 本システムの測量手順
本システムの特長
本システムの特長は以下のとおりです。
- 測量機器を盛り替える必要がないため、施工を止めることがなく、作業の効率化を図ることができる。
- 測量頻度を自由に設定ができ、連続的に測量できるため測量精度が高い。
- シールドトンネルの大きさにかかわらず適用できる。
現場での実証
本システムの実用性を検証するため、当社のシールドトンネル工事現場で本システムの実証実験を行いました。その結果、シールド機の外径が3.0mのトンネルでも問題なく測量ができ、また目標としていた誤差範囲内の精度(掘進1mあたり4.0mm以内)を満足し、本システムの実用可能性を確認することができました。
今後の展開
当社は今後、開発技術であるAI Transform Shield※2と本システムを連携させ、高精度な掘進管理技術を確立して、お客様に信頼される安全で確実なトンネル構築技術の提供を目指します。
- ※2 AIを活用したシールド工で効率化・品質向上を図る